/*VernierLaserTracker (v 2018.5)
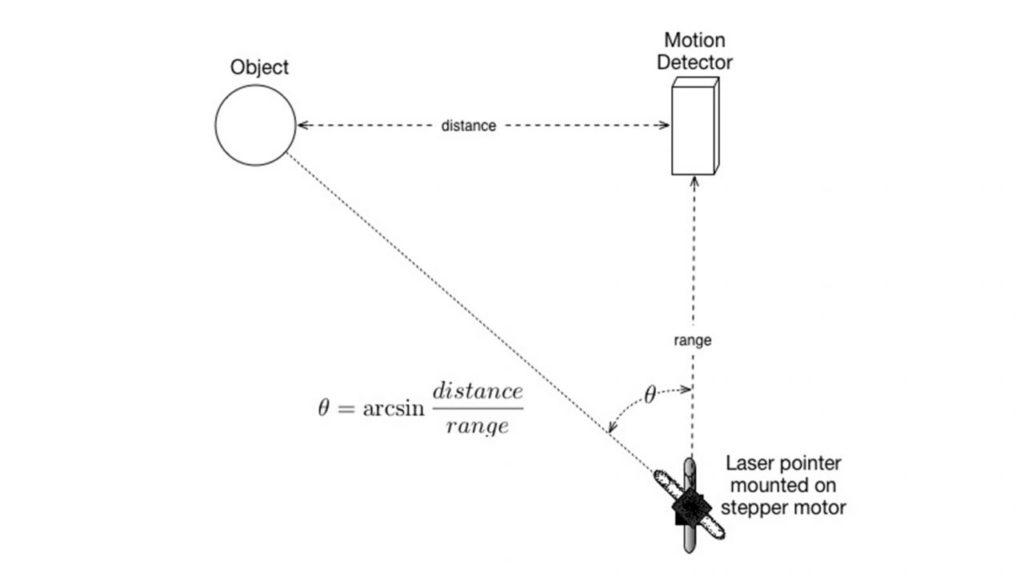
Monitors the position of an object using a Vernier Motion Detector
and then aims a laser pointer mounted on a servo motor at the object.
This sketch uses three Arduino libraries. To read the Motion Detector, it uses
the VernierLib library. Because of the use of a trig function (arctangent) in the
calculations, this sketch requires the math.h library. It also requires the servo
library to control the servo motor.
See www.vernier.com/arduino for more information.
*/
#include <math.h>
#include <Servo.h>
Servo myservo; // create servo object to control a servo
#include "VernierLib.h"
VernierLib Vernier;
float distance = 0;// distqnce in cm
int Range=100; //distance in cm from Laser Pointer/Servo motor to Motion Detector
const int Laser = 6;//laser pin, connect laser to pin 6 of the Arduino, which is the first line on Digital 2
void setup()
{
myservo.attach(9); // attaches the servo on pin 9 to the servo object
// initialize serial communication at 9600 bits per second:
Serial.begin(9600);
Serial.println(" ");
Serial.print("Distance");
Serial.print("\t"); //tab character
Serial.print ("Angle");
Serial.print("\t"); //tab character
Serial.println ("Angle");
Serial.print("centimeters");
Serial.print("\t"); // tab character
Serial.print ("radians");
Serial.print("\t"); // tab character
Serial.println ("degrees");
}
void loop()
{
float ArcTan=0;
double Angle =0;
float Degrees;
int ServoSetting;
distance = Vernier.readMotionDetector();
Serial.print(distance);
Serial.println(" cm");
if (distance < 120)
{
digitalWrite(Laser, HIGH);// if closest item is within 120 cm it turns laser on
}
else digitalWrite(Laser, LOW);
delay(100);//delay a tenth of a second
Serial.print(distance);
Serial.print("\t"); // tab character
ArcTan = atan(distance/Range);
Serial.print(ArcTan);
Serial.print("\t"); // tab character
Degrees= ArcTan*57.29578; //convert radians to degrees
Serial.println(Degrees);
ServoSetting =Degrees;
myservo.write(ServoSetting); // sets the servo position according to the scaled value
delay(50); //delay a bit
}